Tobias,The caster rotates the fly rod near the butt and this "rotation center" you refer to will not move upwards since it is hold by a constraint - like the grip of a whip.]
I think we are talking about two different "rotation centers" I am talking about the intatant center of rotation or instantaneous velocity center that includes the effects of both the translation and rotation of a rigid body (like the butt of the rod with little or no bend) on its velocity at a given point in time.
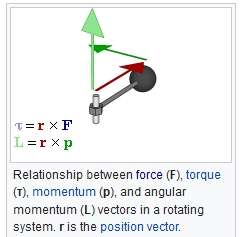
From a velocity standpoint the velocity of a point on the rod is equal to omega x r where omega is the angular velocity of the objects angular orientation change at a point in time and r is the distance from a point on the butt to the instantaneous rotation center.
Similarly for the KE of the object. In order for the kinetic energy of the moving object to be equal to KE=1/2*I*omega.^2 then the calculation of the objects moment of inertia (I) must take the distance from its c.g. to the instantaneous velocity center into account via the parallel axis theorem.
I don't think the caster rotates the rod about the grip. It could just as easily be rotated about the shoulder or the elbow if the angular velocity of those joint angles dominates the movement of the rod.The caster rotates the fly rod near the butt
Thus the instantaneous velocity center will not be at the center of the axis of rotation when that axis center is free to move in space. Consequently the axis of rotation of a rod is not near the grip unless the angular velocity change of the shoulder and elbow are zero and the rotation comes from a fixed wrist location.
Chris Korich uses very little wrist rotation in his accuracy casting stroke, thus his instant velocity center never gets very close to his wrist. Similarly for Noel's casting robot. In that case the both the rotation axis and the instant velocity center was fixed at the stepper motor not at the point where the rigid linkage from the stepper motor were connected to the grip of the rod.
Just as an aside I don't see how your fit to the radius of curvature of the rod has anything to do with angular momentum.
The mass of the rod is not moving along those circle fits so how could those circles be related to angular momentum?
Gordy