I think the up part of the wrist on final rotation is actually a consequence of the rod unloading.
Paul,
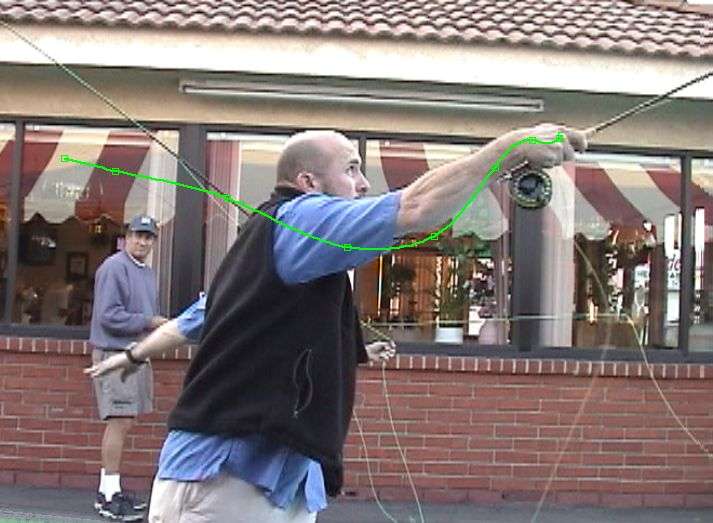
If you could see the motions in slow motion I think you would find the up-path of the hand is a result of straightening the elbow.
The bottom of the dip generally happens when the rod is at or near MRF. That is when maximum acceleration force is being applied to the line. Thus by straightening the elbow at that point you tend to maximize the distance the tip travels while near maximum force is being applied to the line. Straightening the elbow increases the angular velocity of the butt as well as increasing the distance the hand moves from MRF to RSP. That is much more effective in producing higher line speeds than if you were to just rotate the wrist at MRF.
Because of style differences, I don't think we understand the kinetic linkage flow of the rotation we use in casting (we couldn't even agree if it was proximal to distal or the other way around in the
kinetic chain thread) but I would agree with John that we should:
Look to the body to generate speed, not the rod.
But mostly in this case I think it's rod-driven as opposed to rod-driving.
From an energy standpoint point I don't think that is the case. The energy added to the line from MRF to RSP in the conventional cast Grunde analyzed for Mathias' 10 meter cast was about three times larger than the energy that was stored in the rod at MRF. I would expect that energy ratio would be even larger for a distance cast; so just as John observed, I think the driving force for a distance cast is coming from the caster, not the rod.
Dirk, thank you for taking the time to plot the paths of these rotation sources for different casters. It is interesting that different casters produce different paths in their casts, but still get world class distances with their own distinctive styles.
Gordy