It seems to me that we have two very different propositions:
- Flexible rod vs. broomstick:
For the same angular acceleration of the butt more energy input with the flexible rod, so it results in higher line speed.
- Falling weight with spring vs. falling weight without spring:
Different linear acceleration of the falling weight, same force input, more energy output for the spring case anyway.
Aitor,
Believe it or not, the reason for what appears to be different causes in the case of casting or your experiment stems from the same basic attribute of an accelerated SHO.
Why do you need to apply more torque to produce the same angular acceleration with a flexible rod as compared to a broomstick? Because the deflection in a flexible rod will overshoot the equilibrium deflection it would have for the applied acceleration. That overshoot produces a larger acceleration force on the line, and thus the torque (force*moment arm) required to achieve the same angular acceleration of the rod is greater.
Here is a refresher overview of the torque required to produce a given angular acceleration if you need it.
That overshoot phenomena is just a fundamental property of a
SHO. Lets suppose you have a mass that is suspended from a spring. The equilibrium deflection in that case will be such that f_spring= -kx (the spring constant ,k, times the deflection x) spring force will equal the f= ma (acceleration force applied to the mass by gravity where a = 9.81 m/s.^2) ,or weight of the mass. For example lets use a spring with a spring constant of 1 N/m and a 51gram mass whose weight is .5 N. The resulting deflection would then be x=.5N/(1N/m)=-.5m.
Now pull down on the mass until the mass is at -1 m and let it go. It will oscillate about that -.5m equilibrium point as shown below.

With an ideal mass-less spring with no damping that oscillation will go on forever about what limits? It turns out, In order for the sum of the KE and PE in the spring-mass system to have a constant value about its equilibrium value it will overshoot the equilibrium point by an amount that equals the initial deflection. Thus in this ideal case our mass would oscillate back and forth between -1 m and 0 meters and the acceleration force on the mass at x=0 would be twice the acceleration force of gravity. Similarly in a spring with an optimum spring constant value the resulting overshoot of the deflection in the spring will produce a peak acceleration force on the brick that is nearly double the force you would expect for string.
Remember the example given back on page 9 about what would happen if the rod (or spring) had an initial deflection that was equal to that new acceleration-induced equilibrium position prior to applying the acceleration? In that very special case there is no overshoot because there was no need for the deflection to change as the lead mass dropped. In that case the deflection force in the spring caused the brick to accelerate with the same constant value as the lead mass. Not by coincidence, that is the same force as would be produced by the string, and thus the force over distance work energy applied to the brick would be nearly the same and there would be next to no advantage for the spring as shown in that post.
However when there is no deflection in the spring when the mass starts to fall the relative conditions are much different. Now there is an offset from the equilibrium deflection associated with the acceleration of the lead mass. At t=0 there is no deflection in the spring and hence no immediate acceleration of the brick. Therefore it will lag the position it would have compared to being pulled by a string. However as the lead mass continues to fall, the spring stretches more and more and applies larger acceleration forces to the brick.
Does the deflection in the spring suddenly stop changing when it gets to the equilibrium point? No. It overshoots that point and continues deflecting until it reaches an equal offset value on the other side of the equilibrium point just as it did in the SHO example above. Thus in your experiment the spring started out with a deflection of zero that was .277 m less than the equilibrium value as calculated on page 9 of this thread. That means in theory, it will reach a deflection value of .554 m before the deflection starts to turn around and head back to zero.
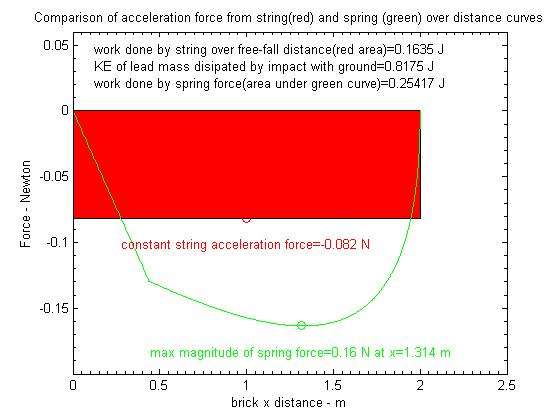
That means the peak acceleration force it will apply to the brick (.544m *.295 n/m=.163 N) is twice as large as it would be with a string (.082 N). You have to solve the ODE to see how that deflection will vary with time, but when you do you can see that it will produce a force vs distance (or a force vs time) curve that is much different than the one you get with a string as shown below:
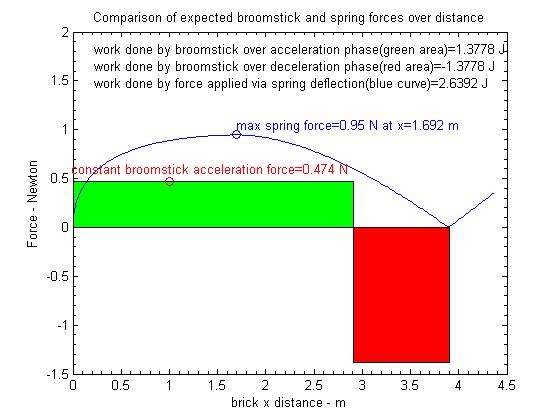
The same work-energy advantage applies when using a "matched" rod to a "matched" casting tempo. The peak acceleration force on the line produced by the flexible rod will be nearly twice the force produced by the broomstick and thus you will get much more line speed with a flexible rod as compared to a broomstick as can be inferred from the comparative work energy areas shown for the Paradigm cast below:
Gordy




