Vince,This is where your experiment will start to depart from a fly cast because the Dynamic Amplification Factor of 2 is true only for suddenly applied forces. For a gradually applied force such as a fly cast, the amplification factor is less than 2 and related to the rise period.
What is your Dynamic Amplification Factor and how do you computed it?
What do you mean by the rise period of the applied acceleration? Don't you think the time it takes to go from no rotation to some significant angular acceleration level in a fly cast would be much less than 1./( loaded frequency) of the rod and line? That was certainly the case in the Paradigm cast.
Once you have a better understanding of Merlin's model I think you will find the match of the rod's spring constant to the magnitude and duration of the positive and negative acceleration phases of the cast will have much more of an effect on the peak amplitude produced by the deflection in the rod as opposed to some relatively short "rise period". Think about energy. There is not much energy in a short rise period, so how much effect could it have on the ultimate work energy produced on the line?
The SHO model that I use does not require a "sudden" applied force for the acceleration of the butt but uses measured ones calculated by taking a derivative of the angular velocity data from the casting analyzer or digitized high speed videos. For example the delayed rotation that Paul uses in his distance casting has a very slow increase in the angular acceleration at the start of his cast. The torque applied to rotate the butt in that cast varied smoothly with no "sudden" jumps in the resulting angular acceleration but Paul still reached very high acceleration levels by the end of power application phase of his cast.
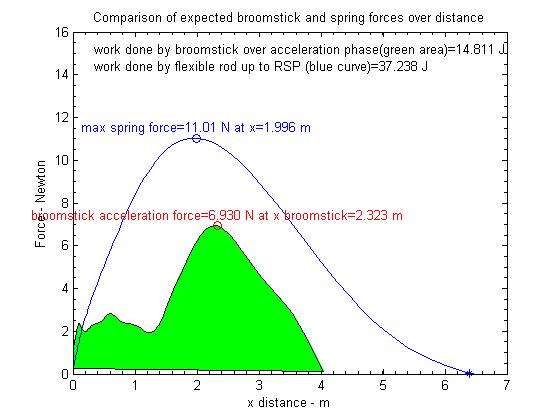
In looking at a comparison of the force over distance curves for Paul's measured acceleration function you still get a sizable increase in the force applied by the rod (spring in Aitor's experiment) as compared to the broomstick (string in Aitor's experiment). as shown below.
As noted in that thread,
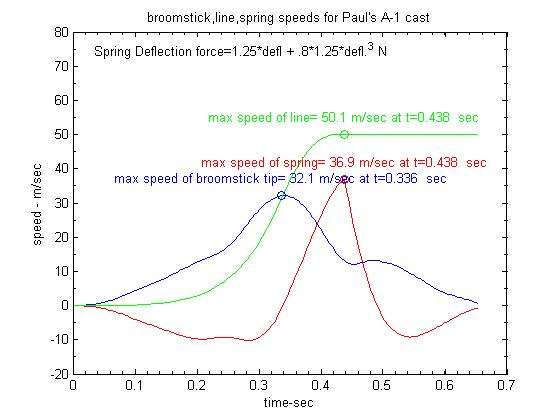
The damping you get in an actual spring means that you never get to a factor of 2 difference in the maximum applied force, but whatever the value I think the increase in the applied force you get with a spring will be significantly larger than it will be with a broomstick. The relative maximum force applied to the line in Paul's cast was more like 1.6 than the factor of two you would expect in a SHO, but it was still significantly larger and the distance that force was applied over the rod's tip path was significantly longer as compared to a rigid lever. As a result the line speed expected with the rod was much higher (50 m/s) than the line speed expected for a broomstick (32 m/s) as shown in the plot below.as is the case with constant acceleration, the force from the flexible rod is quite a bit larger than the force produced by a rigid one. The relative force from the rod is not twice as large, since the acceleration force is changing faster than the rod’s loaded frequency can keep up with the changes in the angular acceleration that Paul applied in this cast.
Gordy